
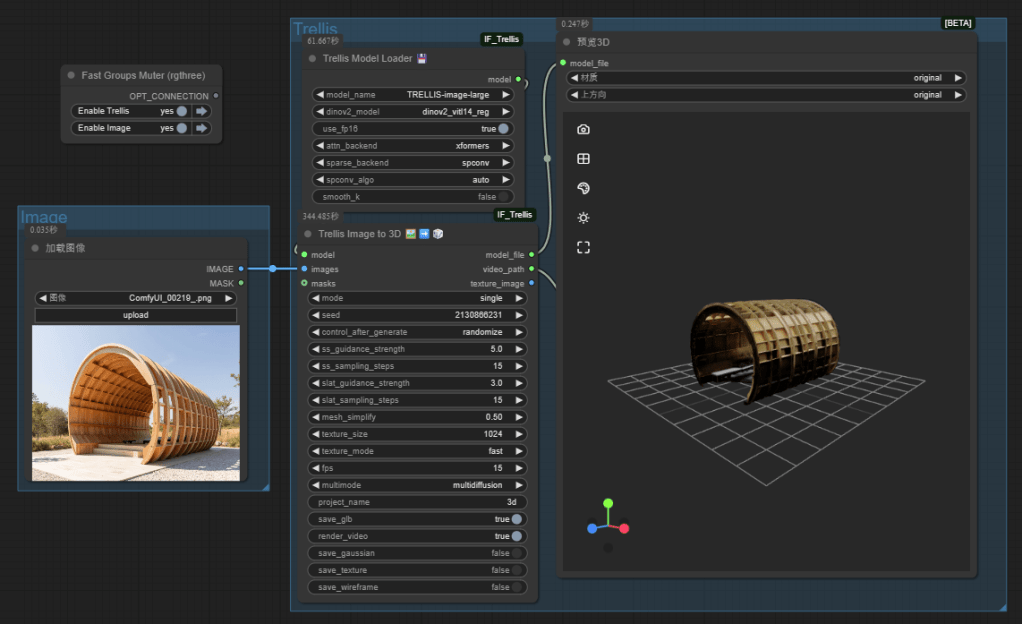
Ai-DFab: Applying Generative AI and Multi-Agent Systems in Design-to-Fabrication Workflows
2026, Journal Article, Taiwan


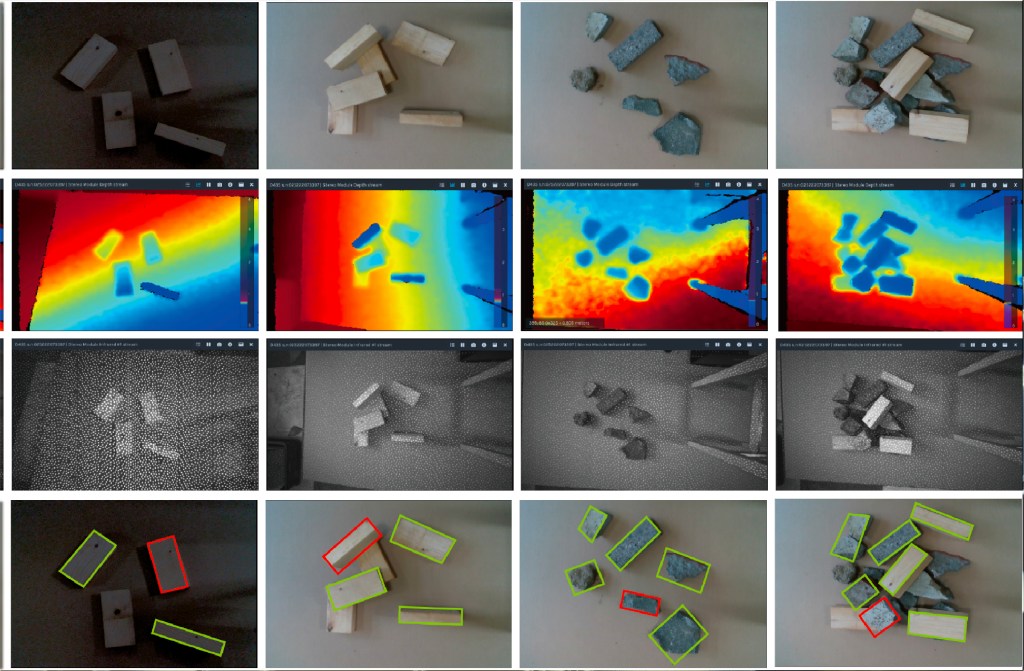
Computer Vision and Human-Robot Collaboration Supported In-Situ Object Recognition System for Robotic Automation
2025, Journal Article, Taiwan

Clustering and Topological Interlocking for Robotic Assembly
2024, Conference Paper, Italy


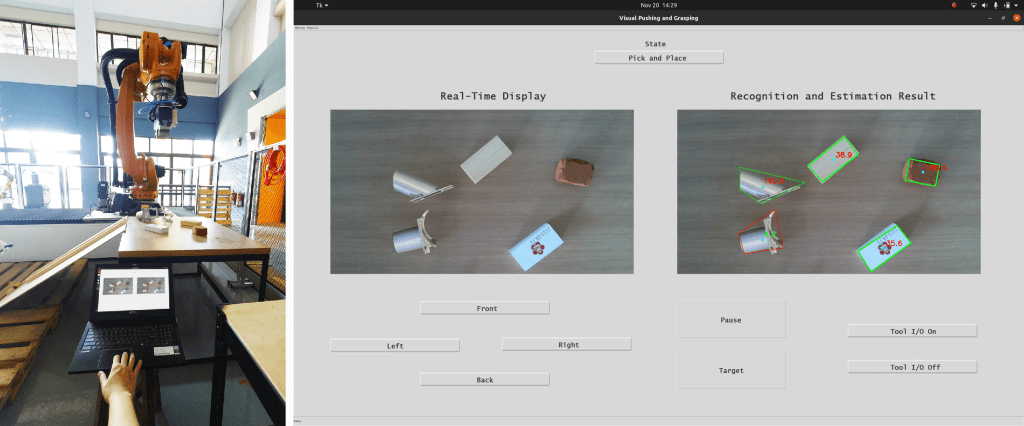
Object Recognition and User Interface Design for Vision-based Autonomous Robotic Grasping Point Determination
2021, Conference Paper, Hong Kong
